Transport vehicles in factories today do not need drivers. Driverless vehicles have been used in production plants and transshipment points for decades, where they automate materials handling. For accident prevention, these systems are currently operated in enclosed areas at low speed, so that the vehicle sensors have time to react. Long transport routes across large factory premises are thus inefficient. The confinement to enclosed areas in turn results in cumbersome in-company transport routes.
This is where the SaLsA project comes in: For smooth integration into the entire materials flow and a high level of automation, it will develop automated guided vehicles for the first time that are able to circulate safely and rapidly outside production shops and warehouses in a joint working environment with conventional human-driven vehicles and pedestrians.
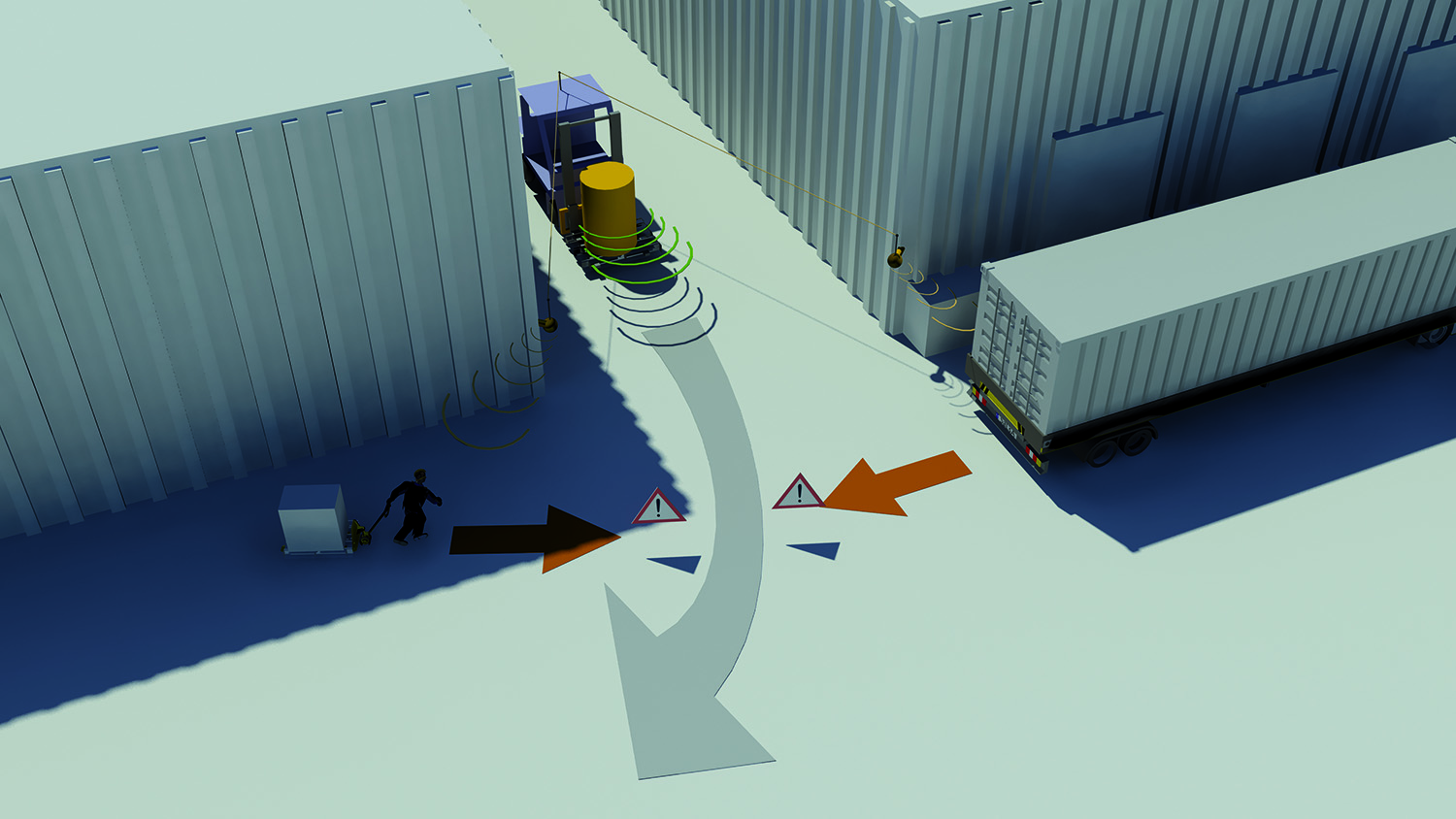
For demonstration purposes, it will test out shunting and turning with transport carriers (containers, swap bodies, etc.) in transshipment, warehousing and production sectors. The efficiency of these automated guided vehicles (AGVs) will be raised by increasing their speed. Higher speeds, however, call for a rapid response to possible risks. To be able to recognize potentially dangerous situations early, the vehicles need to have a picture of the environment beyond their visibility range. To do this, data from vehicle sensors and stationary sensors will be connected intelligently with other information sources, such as map data or process information. This information will be amalgamated into an overall model of the current environmental situation. This composite environment model will provide a planning horizon for the possible movements of all mobile objects by means of forecasting techniques that the AGVs can use for planning and tracking their local path. Based on this, the automated guided vehicles will plan their movements autonomously and can thus ensure efficient and safe operations. A clear advantage of external sensors is their ability to detect pedestrians in blind areas, e.g. between containers. If the pedestrian sensor reliably confirms that no personnel are present, an AGV can approach the gangway fast or must otherwise drive very slowly. The information from the composite environment model will therefore raise efficiency here as well with no detriment to safety.
The challenge consists in integrating the dispersed sensor data into a meaningful overall model and the appropriate use of simulation processes to forecast future system states in real time. In future, the developed technology will be transferable to a variety of similar fields of application, for the automation of forklift trucks, tractors or personnel transporters, for example.
A major aspect of the project are the legal issues of automated guided vehicles in surroundings that are not enclosed (liability risk). At present, this problem is dealt with either by keeping to very slow speeds or by excluding personnel. The challenge here is to meet safety requirements also at higher speeds. The legal framework for this needs clarification.