When it comes to automation safety is always a key factor. To ensure that no human comes to harm by machinery, SafeLog developed a completely new safety concept which will fundamentally change the interaction between humans and robots.
SafeLog Vision
Nowadays more and more Automated Guided Vehicles (AGVs) are used to support the human workers in large warehouses by transporting different products to a fix pick station. Even though the AGVs and humans are following their predefined trajectories, it is not always possible to prevent encounters. For this reason SafeLog's vision is to develop a large-scale flexible warehouse system which enables a safe and efficient collaboration of humans and AGVs in the same area at the same time.
The Safety concept
The concept consists of a 3-layered safety system where the most outer layer, Level C, will try to prevent human-robot encounters by optimal routing of AGVs and humans. Level B will warn humans and machines about possible encounters that could not be prevented by Level C and ultimately Level A will shut down the specific AGV and ensure functional safety when Level C and B failed to prevent encounter.
Fleet Managemnet System
The Fleet Management System is a multi-objective, largescale planner with additional error handling subsystem (monitoring, diagnosis and maintenance) and lifecycle system-management subsystem (reorganization, flexibility and setup). It is responsible for the coordinated and goal oriented path planning for heterogeneous entities like different AGVs and human workers as well as for scheduling their tasks.
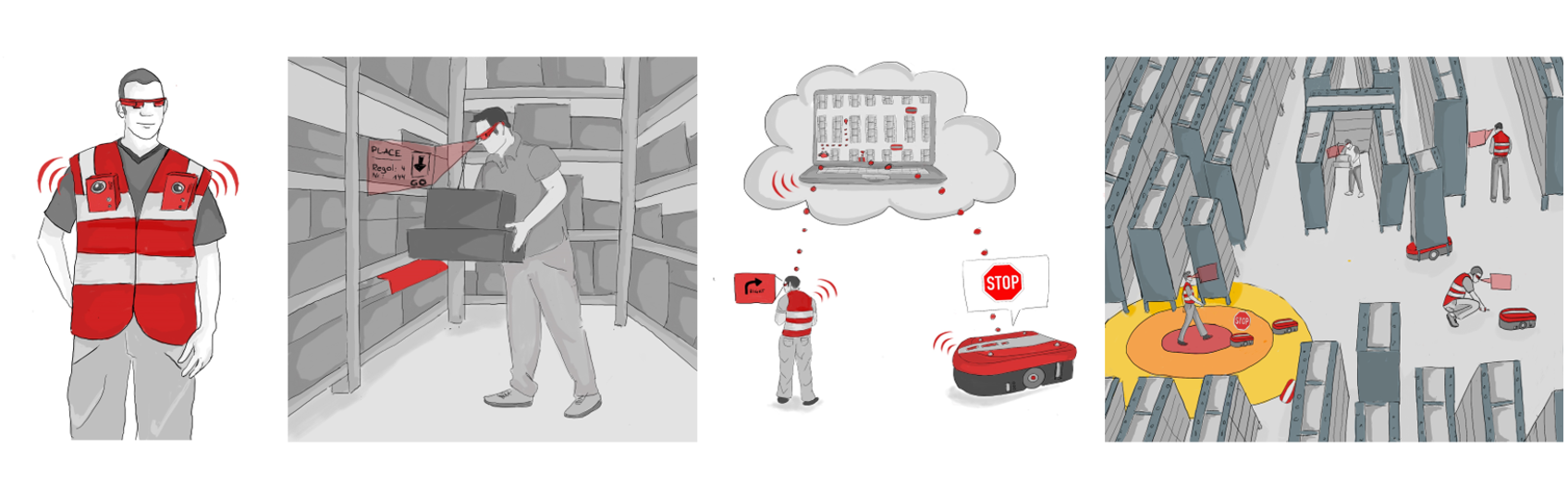
Safety Vest
To maintain safety for the humans, while they work in close collaboration with AGVs, a mandatory Safety Vest has to be worn. Equipped with sensors it enables to locate the human and to communicate with other systems. Besides the vest issues a signal that makes the AGVs aware of human workers within their vicinity.
Augmented Reality
Augmented Reality is based on wearable devices like glasses. They assist the human workers in their different roles by navigating and providing them with context sensitive information and alarming them about close moving AGVs. To ensure a high level of interaction the system will focus on solving: a) high precision head localization; b) human intention recognition and c) human awareness of other AGVs.
SafeLog Impacts
This project will lead to reduction of system wide downtimes by introduction of advanced motion planning by scalable, heterogeneous path-planning methods, integrating humans and AGVs into a generalized concept. Ubiquitous localization methods will allow safe interaction between humans and AGVs.