With AI and Open Source to new possibilities in object recognition

The thematic context
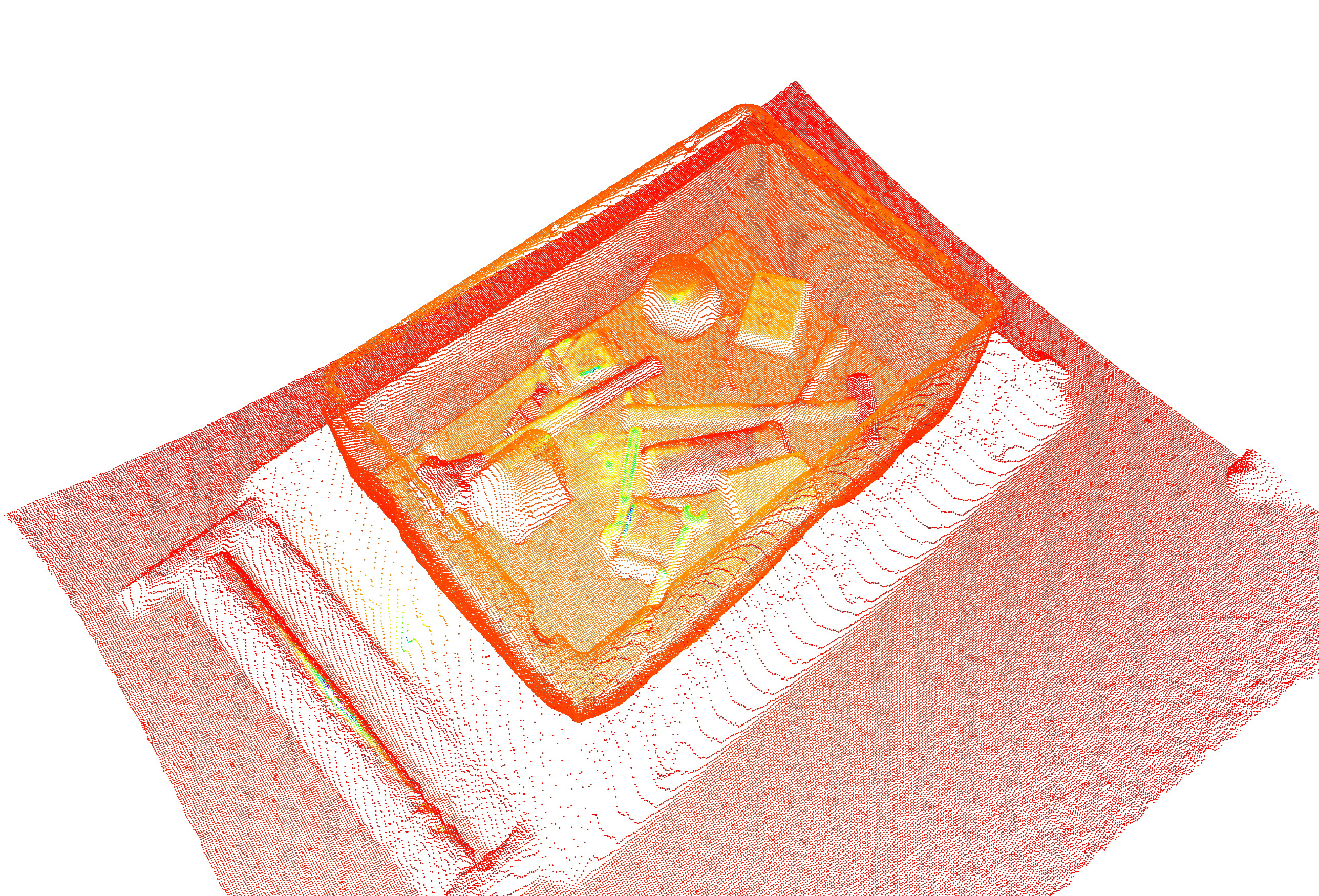
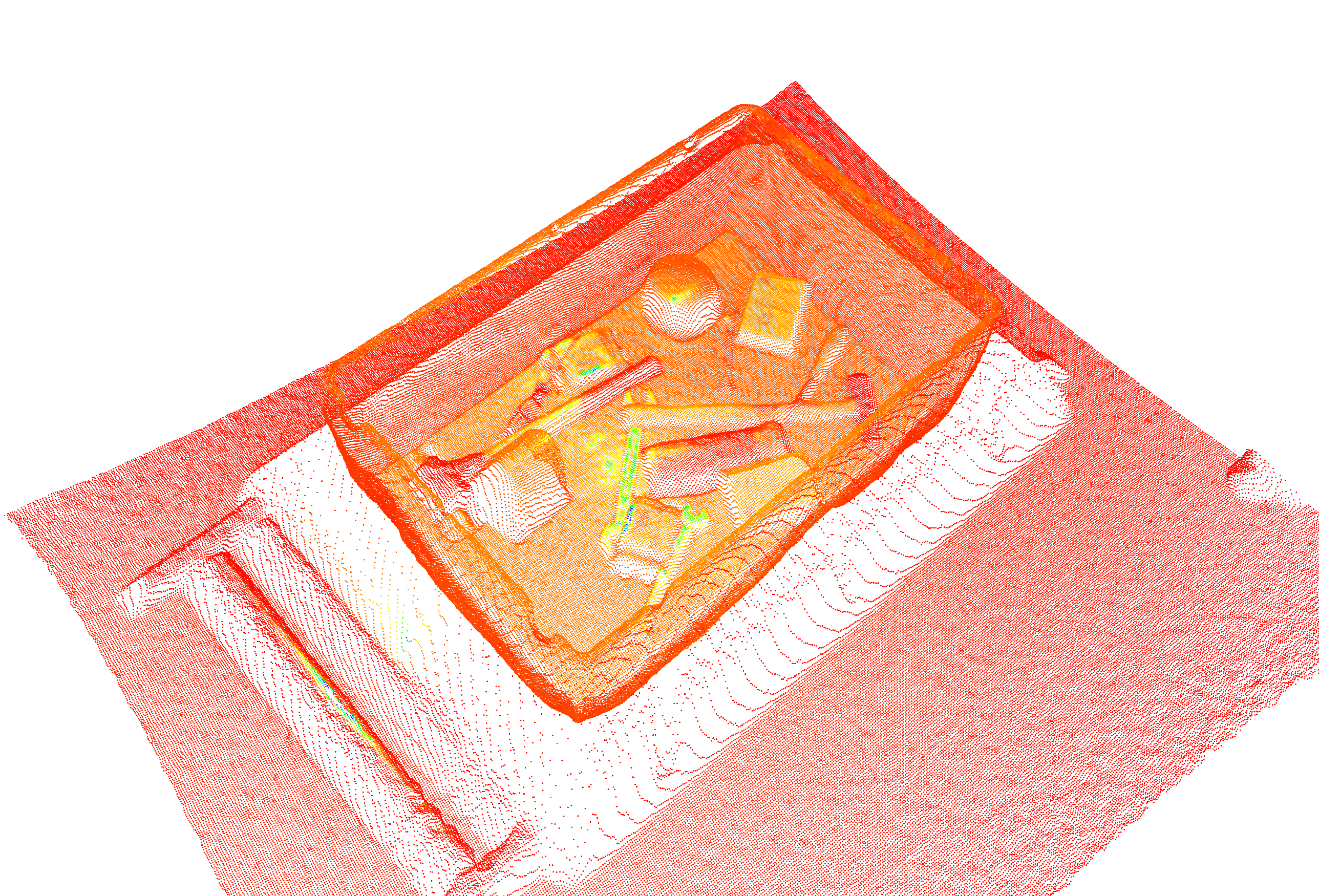
On the way to fully flexible and automated logistics, topics such as sensor technology and object recognition are of particular relevance. For example, the reliable recognition of objects in sensor data is a basic requirement for the automation of logistics processes. In particular, the recognition of objects as 3D sensor data is essential for flexible autonomous applications. However, in addition to high development costs for new solutions, previous solutions in 3D object recognition are not very flexible because they are difficult to transfer to different applications. Innovative solutions are needed to meet these challenges.