Mittels KI und Open Source zu neuen Möglichkeiten in der Objekterkennung

Der thematische Hintergrund
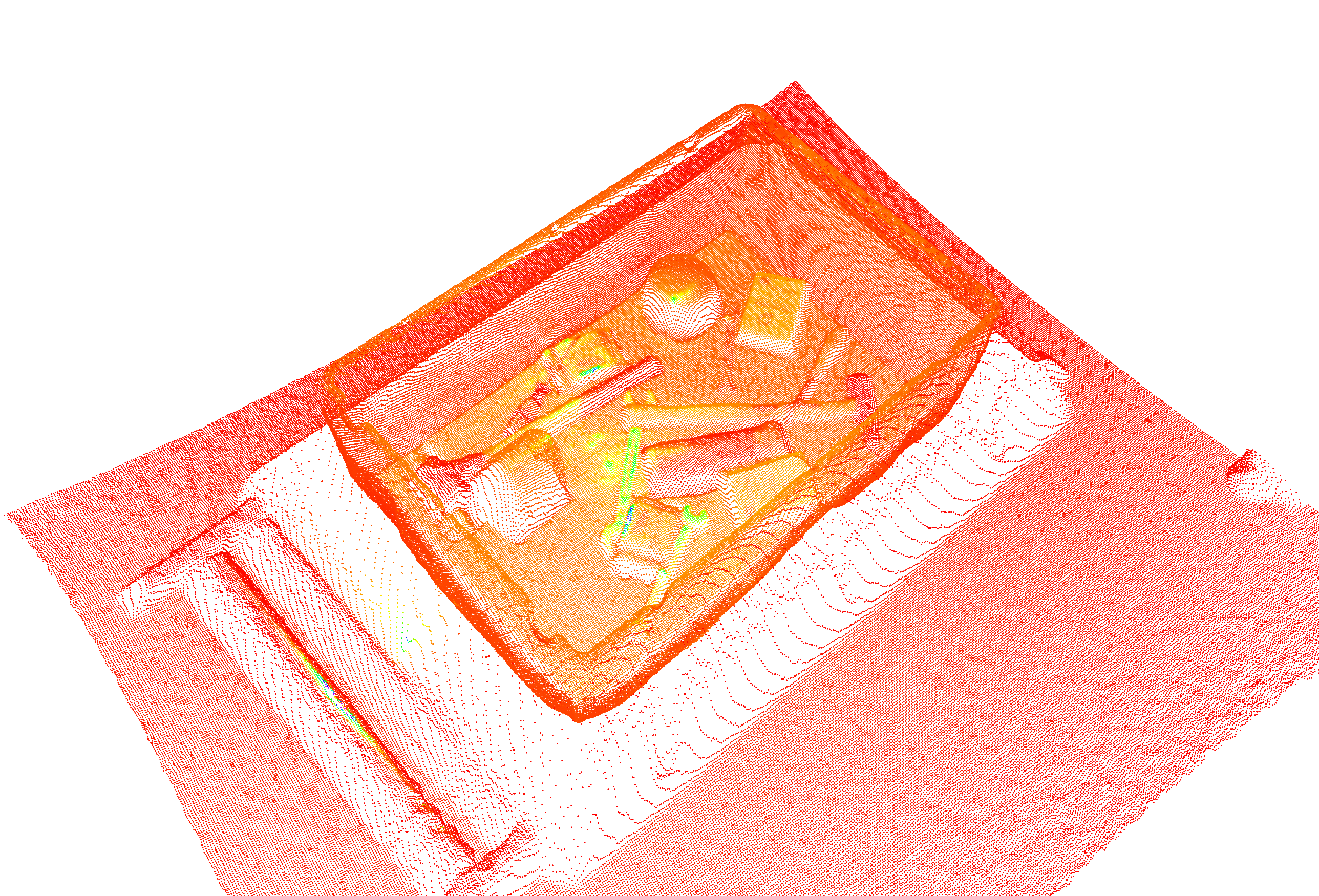
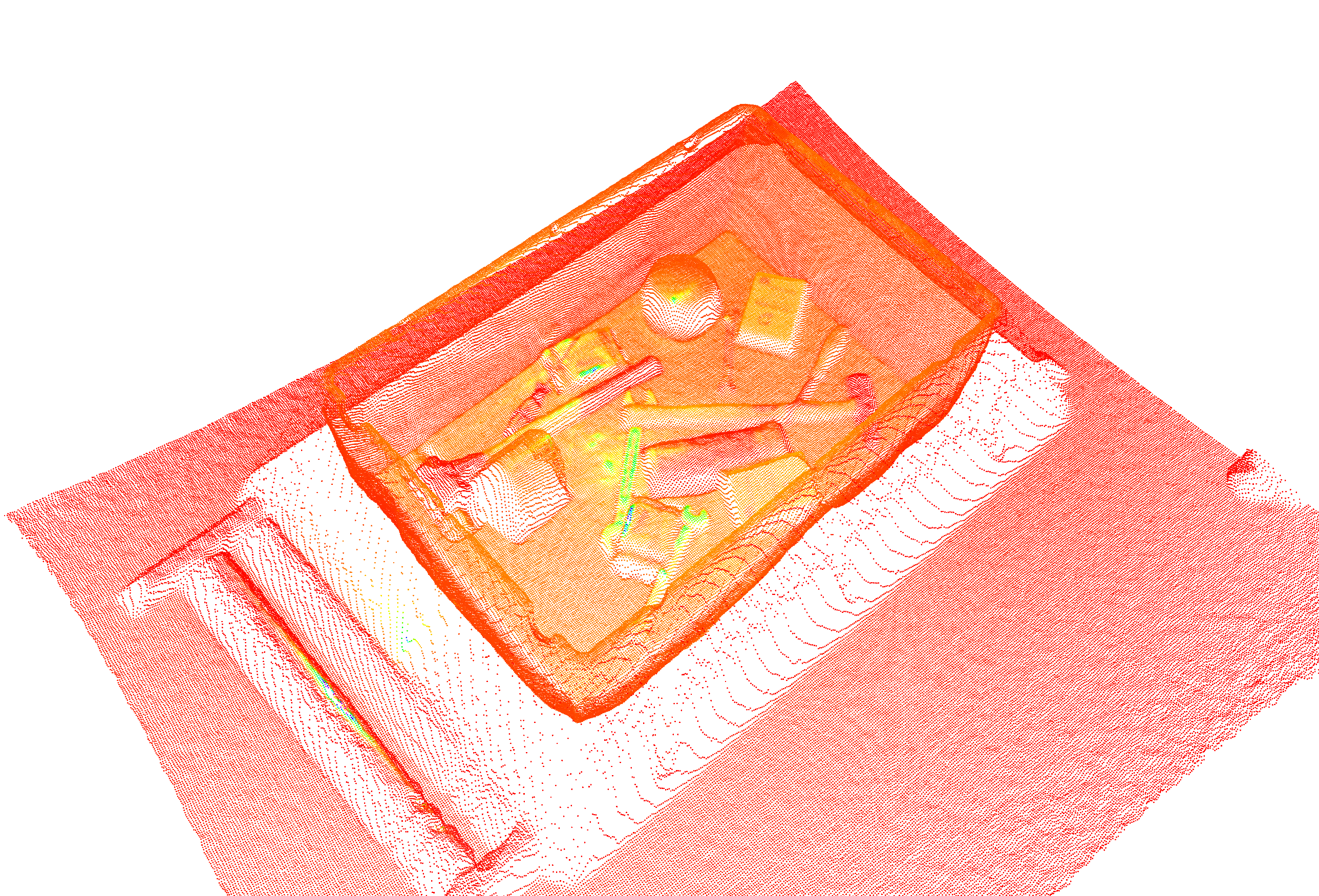
Auf dem Weg zur vollständig flexiblen und automatisierten Logistik sind Themen wie Sensorik und Objekterkennung von besonderer Relevanz. So ist für die Automatisierung logistischer Prozesse die zuverlässige Erkennung von Objekten in Sensordaten eine Grundvoraussetzung. Insbesondere die Erkennung von Objekten als 3D-Sensordaten ist für flexible autonome Anwendungen essenziell. Neben hohen Entwicklungskosten für neue Lösungen sind bisherige Lösungen in der 3D-Objekterkennung jedoch wenig flexibel, da sich diese nur schwer auf verschiedene Anwendungen übertragen lassen. Um diesen Herausforderungen zu begegnen, bedarf es innovativer Lösungen.